Vectors (R)
Vectors के बेसिक्स¶
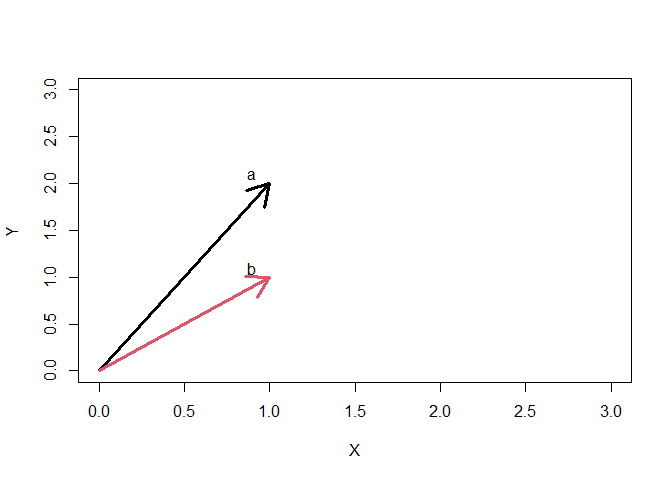
दो vectors a और b को consider करें।
a <- c(1,2)
b <- c(1,1)
इन दो vectors को 2D coordinate system में इस तरह visualize किया जा सकता है:
हम इन vectors पर दो प्रकार के linear operations कर सकते हैं:
1. Vector addition
2. Scalar के साथ vector का multiplication
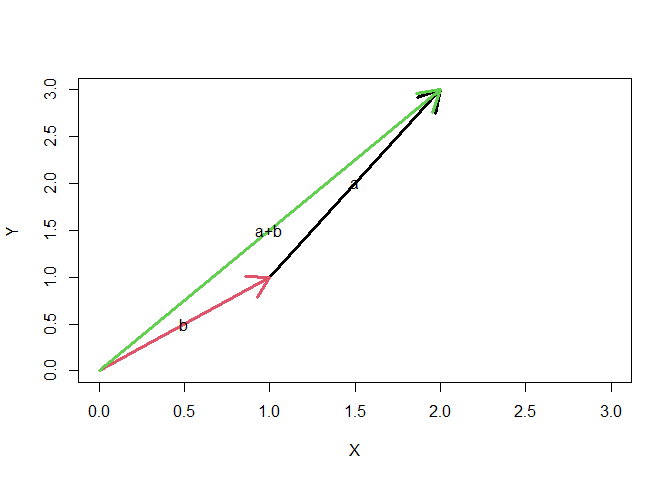
Vector addition:
अगर हम a और b को जोड़ते हैं, तो sum एक vector होगा जिसके members a और b के corresponding members का sum होंगे।
a+b
## [1] 2 3
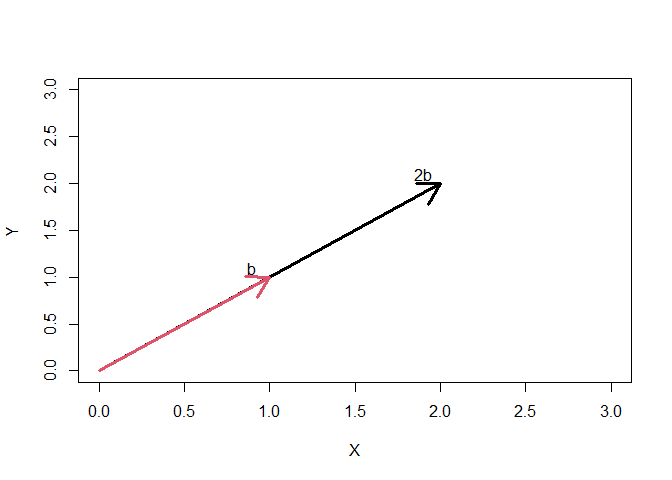
Vector multiplication:
अगर हम b को 2 से multiply करते हैं, तो हमें एक vector मिलेगा जिसके हर member को 2 से multiply किया गया है।
2*b
## [1] 2 2
Subspaces और span¶
चूंकि हम vectors पर केवल दो प्रकार के linear operations कर सकते हैं, इसलिए कोई भी linear combination इस रूप में होगा:
$$ S= \alpha a + \beta b $$ जहां \(\alpha\) और \(\beta\) वास्तविक संख्याएं हैं और \(a\) और \(b\) vectors हैं।
\(a\) और \(b\) के सभी संभावित linear combinations के बारे में क्या?

Vector a और b का linear combination पूरा 2D plane बनाता है।
Vector space वह space है जिसमें vector मौजूद हो सकता है। एक 2D vector, जैसे a या b, का vector space \(R^2\) होगा और एक 3D vector जैसे d=[1,2,3] का vector space \(R^3\) है।
Span: सभी संभावित linear combinations का सेट उन vectors के span के रूप में जाना जाता है।
उपर्युक्त दो vectors a = [1,2] और b=[1,1] के लिए, पूरा 2D space span है, क्योंकि हम 2D space में हर vector को इन दो vectors के linear combination के रूप में प्राप्त कर सकते हैं।
Vector space और vector span के बीच का अंतर समझाने के लिए, दो vectors d=[1,2,3] और e=[1,1,1] पर विचार करें।
चूंकि ये दोनों vectors 3 dimensions में हैं, इनका vector space 3 या \(R^3\) है।
d+e जोड़ने पर मुझे 3D में एक और vector मिलता है।
d <- c(1,2,3)
e <- c(1,1,1)
d+e
## [1] 2 3 4
लेकिन d और e के लिए सभी linear combinations क्या हैं?

यह एक 2D plane बनाता है जो origin के माध्यम से जाता है। इसलिए ये vectors एक plane (in \(R^2\)) को span करते हैं, हालांकि उनका vector space (\(R^3\)) है।
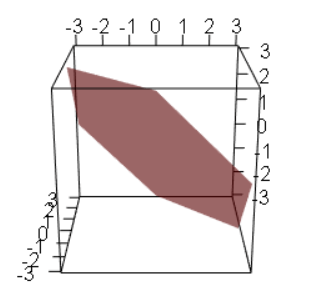
किसी भी vectors के सेट का अधिकतम span उनके vector space के बराबर होता है।
Linear Independence¶
Linear independence तब होती है जब एक vector का दूसरे से कोई संबंध नहीं होता। पहले उदाहरण में a=[1,2] और b=[1,1] के साथ, 2D space में कोई भी vector a और b के linear combination के रूप में लिखा जा सकता है। दूसरे उदाहरण में d=[1,2,3] और e=[1,1,1] के साथ, plane पर कोई भी vector d और e के linear combination के रूप में लिखा जा सकता है। एक vector जो plane में नहीं है, जैसे f = [2,3,3], d और e के लिए linearly independent है, क्योंकि कोई \(\alpha\) और \(\beta\) ऐसा नहीं है जो \(f=\alpha d+\beta e\) को संतुष्ट करे।
n dimensions के vector space में (vector space n है), अधिकतम n vectors हो सकते हैं जो linearly independent हैं।
Bases, norms और inner products¶
\(R^n\) space के लिए एक basis कोई भी linearly independent vectors का सेट S है ऐसा कि span(S) = n।
उपर्युक्त उदाहरणों से, a और b vector space \(R^2\) में हैं और उनका span भी \(R^2\) है। इसलिए वे \(R^2\) के लिए एक basis बनाते हैं।
इसी तरह, तीन independent vectors d, e और f vector space \(R^3\) में हैं और \(R^3\) के लिए एक basis बनाते हैं।
\(R^2\) के लिए standard basis [1.0] और [0,1] है।
Vector का norm vector की लंबाई होती है।
norm(a, type="2")
## [1] 2.236068
norm(d, type="2")
## [1] 3.741657
Dot product (या inner product) दो vectors को input के रूप में लेता है और एक संख्या को output के रूप में लौटाता है। इसे इस तरह परिभाषित किया गया है: \(\bar{x}.\bar{y} = \sum{x_i\times y_i}\)। यह एक vector की छाया की लंबाई को दूसरे पर दर्शाता है।
library(geometry)
dot(a,b)
## [1] 3
इस श्रृंखला में अगले पोस्ट में, मैं matrices के बारे में बात करूंगा।